1 In this system, when is the equilibrium point and what does it mean?
1.1 Front
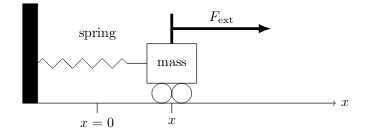
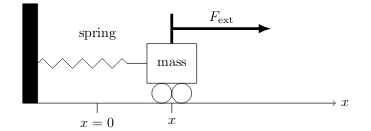
In this system, when is the equilibrium point and what does it mean?
1.2 Back
It’s at \(x=0\), and it’s the point where the spring is relaxed, which means that it is exerting no force.
2 Which is the differential equation for this system?
2.1 Front
Which is the differential equation for this system?
2.2 Back
\(m \ddot{x} = F_{\text{spr}} + F_{\text{ext}}\)
3 Describe the model of the force of a spring
3.1 Front
Describe the model of the force of a spring
Looking for the simplest valid in general
3.2 Back
Is characterized by the fact that is depends only on position
- \(x \gt 0 \implies F_{\text{spr}}(x) \lt 0\)
- \(x = 0 \implies F_{\text{spr}}(x) = 0\)
- \(x \lt 0 \implies F_{\text{spr}}(x) \gt 0\)
Using the tangent line approximation
\(F_{\text{spr}}(x) = -kx\), where \(k \gt 0\)
It’s call Hooke’s Law, and \(k\) is called the spring constant
4 How can we model friction that it depends only on the velocity of the mass (no position)?
4.1 Front
How can we model friction that it depends only on the velocity of the mass (no position)?
4.2 Back
Using a dashpot, that is a cylinder filled with oil and a pistol moves through.
\(F_{\text{dash}} = f(\dot{x})\), it opposes the velocity
- \(\dot{x} \gt 0 \implies F_{\text{dash}} \lt 0\)
- \(\dot{x} = 0 \implies F_{\text{dash}} = 0\)
- \(\dot{x} \lt 0 \implies F_{\text{dash}} \gt 0\)
\(F_{\text{dash}}(\dot{x}) = -b \dot{x}\)
This is called linear damping and \(b\) is called the damping constant
5 What is a linear damping?
5.1 Front
What is a linear damping?
5.2 Back
It’s a simple model of friction that depends only on the velocity of the mass, not position
\(F_{\text{dash}}(\dot{x}) = -b \dot{x}\), where \(b\) is the damping constant
6 Write the differential equation which model this figure?
6.1 Front
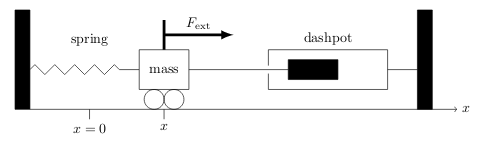
Write the differential equation which model this figure?
6.2 Back
- \(m \ddot{x} = F_{\text{spr}}(x) + F_{\text{damp}}(\dot{x}) + F_{\text{ext}}\)
- \(m \ddot{x} + b\dot{x} + kx = F_{\text{ext}}\)
7 What is the Hooke’s law?
7.1 Front
What is the Hooke’s law?
7.2 Back
It’s the law which model the force of a spring which depends only on the position of the mass
\(F_{\text{spr}}(x) = -k x\)
8 Describe what is a general linear differential equation
8.1 Front
Describe what is a general linear differential equation
The generic form, and what means each part of the equation
8.2 Back
\({\displaystyle a_x x^{(n)} + a_{n-1}x^{(n-1)} + \cdots + a_1\dot{x} + a_0 x = g(t)}\)
- \(a_k\) are the coefficients
- May depend upon \(t\), but not on \(x\)
- If \(a_n\) is not zero then the differential equation is said to be of order \(n\)
- Are parameters of the system
- LHS of the equation represent the system
- RHS of the equation represent the input signal
If all coefficients are constant, this equation is called constant coefficient linear equation
9 Which the form of the equation of a second order homogeneous constant coefficient linear equation?
9.1 Front
Which the form of the equation of a second order homogeneous constant coefficient linear equation?
9.2 Back
\(\ddot{x} + A\dot{x} + Bx = 0\)
10 What is the model of a simple harmonic oscillator?
10.1 Front
What is the model of a simple harmonic oscillator?
In terms of \(\omega\), and solutions
10.2 Back
It’s when the system is undamped, where it ODE is \(m \ddot{x} + kx = 0\)
\({\displaystyle \ddot{x} + \frac{k}{m} x = 0}\)
If we let \(w = \sqrt{k/m}\), then \(\ddot{x} + \omega^2 x = 0\)
\(x(t) = a x_1(t) + b x_2(t)\), where \(x_1(t) = \cos(\omega t)\) and \(x_2(t) = \sin(\omega t)\)
Since the input is \(0\) and the equation is linear, we can use superposition of solutions to get the general solution
\(x(t) = a \cos(\omega t) + b\sin(\omega t) = A \cos(\omega t - \phi)\)
Where \(x(0) = a\) and \(\dot{x}(0) = \omega b\), so you can solve (uniquely) for \(a\) and \(b\) to give any desired initial condition
11 What is the period of a nonzero solution \(\ddot{x} + 4x = 0\)
11.1 Front
What is the period of a nonzero solution $\ddot{x} + 4x = 0$
11.2 Back
Natural frequency \(\omega_0 = \sqrt{k/m} = 2\)
General solution, \(x(t) = c_1 \cos(2t) + c_2 \sin(2t) = A \cos(2t - \phi)\) (In both rectangular and phase-amplitude form)
So, the period \(P = \frac{2\pi}{\omega} = \frac{2 \pi}{2} = \pi\)
12 How can we solve this general second ODE?
12.1 Front
How can we solve this general second ODE?
\(m\ddot{x} + b \dot{x} + kx = 0\)
Explain the process to get a solution
12.2 Back
- It’s similar to \(\dot{x} +kx=0\) which solution is \(x = e^{-kt}\)
- We’ll be optimistic and try for exponential solutions
- \(x(t) = e^{rt}\)
- Plug into the ODE
- \(x = e^{rt}\)
- \(\dot{x} = re^{rt}\)
- \(\ddot{x} = r^2e^{rt}\)
- \(m\ddot{x} + b\dot{x} + kx = 0 \implies (mr^2 + br + k)e^{rt} = 0\)
- As \(e^{rt} \neq 0\) for any \(t\), we can divide up this equation by \(e^{rt}\)
- \(x(t) = e^{rt}\) is a solution always that \(r\) satisfies the characteristic equation \(mr^2 + br +k = 0\)
- The characteristic polynomial \(p( r) = mr^2 + br + k\)
- Solving the characteristic equation we’ll get 2 solutions \(x_1(t) = e^{r_1t}\) and \(x_2(t) = e^{r_2t}\)
- By superposition, the linear combination of independent solutions
- \(x(t) = c_1x_1(t) + c_2 x_2(t) = c_1e^{r_1t} + c_2 e^{r_2t}\)
13 What is the characteristic equation for solving second ODE?
13.1 Front
What is the characteristic equation for solving second ODE?
\(m \ddot{x} + b\dot{x} + kx = 0\)
13.2 Back
In a homogeneous second order ODE, we’ll be optimistic and say that \(x(t) = e^{rt}\) is a solution for this ODE. Plugging in the ODE
\((mr^2 + br + k)e^{rt} = 0\)
That’s the characteristic equation
14 What is the characteristic polynomial for General \(n\text{-th}\) ODE?
14.1 Front
What is the characteristic polynomial for General $n\text{-th}$ ODE?
\(a_nx^{(n)} + \cdots + a_1\dot{x} + a_0 x = 0\)
14.2 Back
\(p( r) = a_n(r^n) + \cdots + a_1 r + a_0\)
15 How can we get a specific solution from IVP on second order ODE?
15.1 Front
How can we get a specific solution from IVP on second order ODE?
Initial conditions: \(x(0)\) and \(\dot{x}(0)\)
15.2 Back
After getting the characteristic equation, you will get 2 possible solutions. Solving this system of equations
- \(x(0) = c_1 e^{r_1 t} + c_2 e^{r_2 t}\)
- \(\dot{x}(0) = r_1 c_1 e^{r_1t} + r_2 c_2 e^{r_2t}\)
16 What is a modal solution?
16.1 Front
What is a modal solution?
16.2 Back
It’s a solution of the form \(x(t) = ce^{rt}\) to the homogeneous constant coefficient linear equation
\({\displaystyle a_x x^{(n)} + a_{n-1}x^{(n-1)} + \cdots + a_1\dot{x} + a_0 x = 0}\)
17 What is a mode of the system?
17.1 Front
What is a mode of the system?
17.2 Back
\(e^{rt}\) is a mode of the system where \(x(t) = e^{rt}\) is a solution to the homogeneous constant coefficient linear equation
\({\displaystyle a_x x^{(n)} + a_{n-1}x^{(n-1)} + \cdots + a_1\dot{x} + a_0 x = g(t)}\)
18 Can I use the solution \(e^{rt}\) for any linear equation?
18.1 Front
Can I use the solution $e^{rt}$ for any linear equation?
Where \(r\) is a root of the characteristic polynomial
18.2 Back
No, this only works for homogeneous constant coefficients linear equations
\({\displaystyle a_x x^{(n)} + a_{n-1}x^{(n-1)} + \cdots + a_1\dot{x} + a_0 x = 0}\)
Where \(a_i\) are constants.
It does not work for non-constant coefficient or inhomogeneous or nonlinear equations
19 How could be the roots of the characteristic polynomial?
19.1 Front
How could be the roots of the characteristic polynomial?
19.2 Back
- Roots can be real or non-real complex numbers
- Roots can also be repeated
20 How are the modal solutions where roots of characteristic polynomial are real?
20.1 Front
How are the modal solutions where roots of characteristic polynomial are real?
In a second order constant coefficients linear equation
20.2 Back
The modal solutions are \(x_1(t) = e^{r_1 t}\) and \(x_2(t) = e^{r_2 t}\)
21 How are the general solution where roots of characteristic polynomial are real?
21.1 Front
How are the general solution where roots of characteristic polynomial are real?
In a second order constant coefficients linear equation
21.2 Back
The general solution is found by superposition
\(x(t) = c_1 x_1(t) + c_2 x_2(t) = c_1 e^{r_1 t}+ c_2 e^{r_2t}\)
22 How are the modal solution where roots of characteristic polynomial are non-real complex?
22.1 Front
How are the modal solution where roots of characteristic polynomial are non-real complex?
In a second order constant coefficients linear equation
22.2 Back
- \(r_1 = a + ib \implies z_1(t) = e^{(a + ib)t}\)
- \(r_2 = a - ib \implies z_2(t) = e^{(a - ib)t}\)
Where \(z\) indicate the functions are complex valued, but both will produces the same basic solutions because of \(\cos(bt) = \cos(-bt)\) and \(-\sin(bt) = \sin(-bt)\)
Applying the superposition solution, we won’t get any new solution
23 How does we expect solutions in DE when has real coefficients?
23.1 Front
How does we expect solutions in DE when has real coefficients?
23.2 Back
We’re expecting real value solutions
24 What is the Real Solution Theorem?
24.1 Front
What is the Real Solution Theorem?
Let \(z(t)\) be a complex-valued solution to a second order constant coefficients linear equation, where all coefficients are real
Give a proof
24.2 Back
The real and imaginary parts of \(z\) are also solutions
If \(z(t) = u(t) + i v(t)\), we can build the table
\begin{align*} k] \qquad z &= u + iv \\\ b] \qquad \dot{z} &= \dot{u} + i\dot{v} \\\ m] \qquad \ddot{z} &= \ddot{u} + i\ddot{v} \\\ \end{align*}
Summing the coefficients (\(z\) is solution of the homogeneous DE)
\((m \ddot{u} + b \dot{u} + ku) + i(m\ddot{v} + b\dot{v} + kv) = 0\)
The only way the sum can be zero is for both of them to be zero. That is, both \(u\) and \(v\) are solutions
25 What is the general solution if roots of characteristic polynomial are complex?
25.1 Front
What is the general solution if roots of characteristic polynomial are complex?
- \(r_1 = (a + ib)\)
- \(r_2 = (a - ib)\)
25.2 Back
Using the Real Solution Theorem, where modal are
- \(z_1(t) = e^{(a + ib)t} = e^{at}(\cos (bt) + i\sin(bt))\)
- \(z_2(t) = e^{(a - ib)t} = e^{at}(\cos (-bt) + i\sin(-bt))\)
From \(z_1(t)\), the real solution is (using superposition)
\(x(t) = c_1 e^{at} \cos(bt) + c_2 e^{at} \sin(bt) = e^{at} (c_1 \cos (bt) + c_2 \sin (bt)) = Ae^{at}\cos(bt - \phi)\)
From \(z_2(t)\), the real solution is
\(x(t) = c_1 e^{at} \cos(-bt) + c_2 e^{at} \sin(-bt) = e^{at} (c_1 \cos (bt) - c_2 \sin (bt)) = Ae^{at}\cos(bt - \phi)\)
Up to a sign these are the same basic solutions as was obtained from \(z_1\), so \(z_2\) would have work just as well
We don’t need to get both real solutions